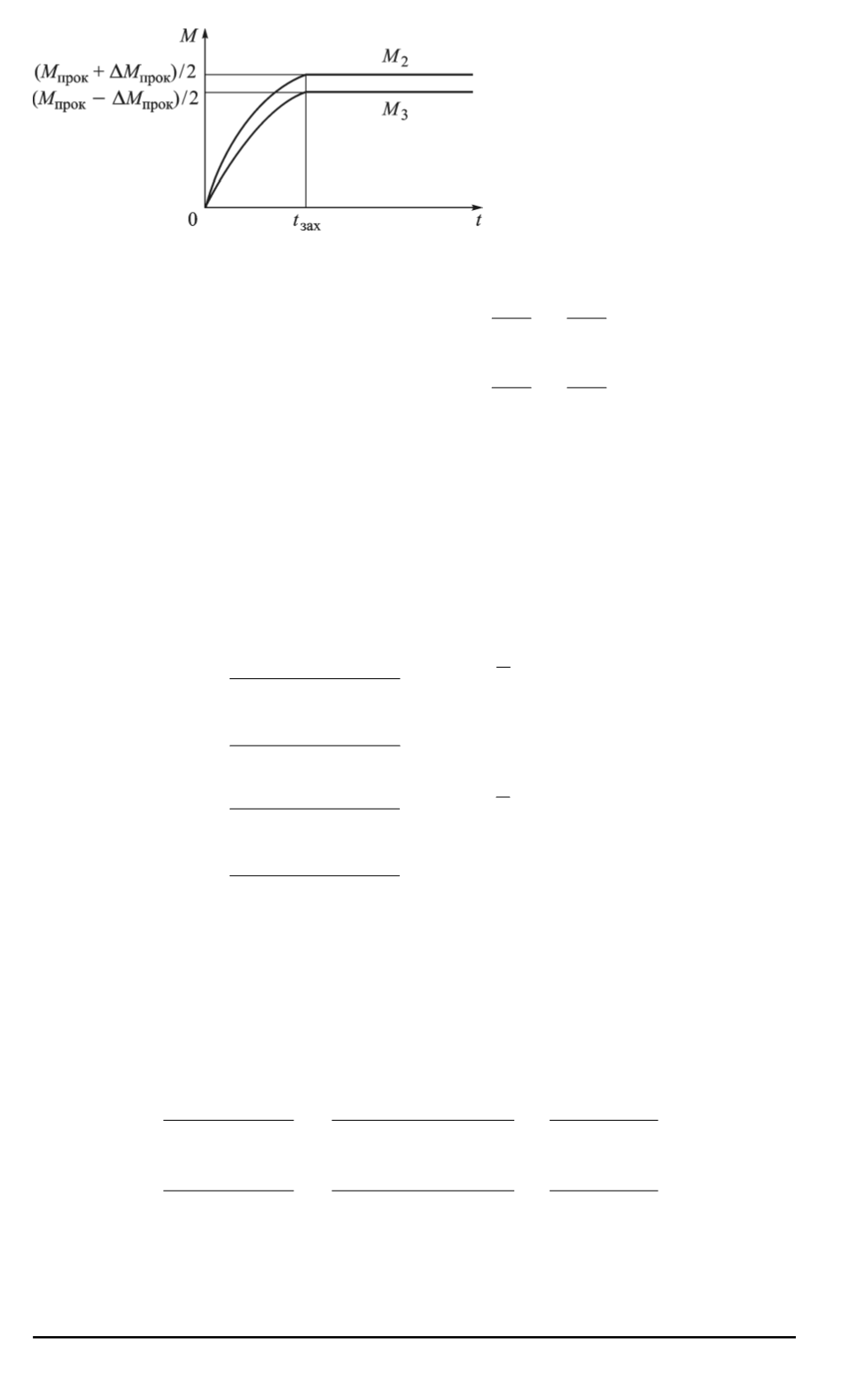
Рис. 3. Внешние момен-
ты технологического со-
противления
где
M
12
=
c
12
(
ϕ
1
−
ϕ
2
) +
β
12
dϕ
1
dt
−
dϕ
2
dt
;
M
13
=
c
13
(
ϕ
1
−
ϕ
3
) +
β
13
dϕ
1
dt
−
dϕ
3
dt
.
(2)
Эта система будет уравновешена, если выполняется условие:
M
1
=
M
2
+
M
3
. Внешний момент со стороны электродвигателя
M
1
=
M
прок
.
Внешние моменты технологического сопротивления со стороны
верхнего и нижнего рабочих валков задаются как экспоненциально-
линейные функции времени [3]:
M
2
=
M
прок
−
Δ
M
прок
2
1
−
e
−
t
A
при
t < t
зах
;
M
прок
−
Δ
M
прок
2
при
t
≥
t
зах
;
M
3
=
M
прок
+ Δ
M
прок
2
1
−
e
−
t
A
при
t < t
зах
;
M
прок
+ Δ
M
прок
2
при
t
≥
t
зах
,
(3)
где
t
зах
— время захвата заготовки валками;
A
= (0
,
4
. . .
0
,
5)
t
зах
—
показатель экспоненты нарастания технологических нагрузок;
Δ
M
прок
— асимметрия нагружения рабочих валков (рис. 3).
Система трех уравнений (1) преобразуется в систему двух уравне-
ний:
d
2
(
ϕ
1
−
ϕ
2
)
dt
2
=
M
1
−
M
12
−
M
13
J
1
−
M
12
−
M
2
J
2
;
d
2
(
ϕ
1
−
ϕ
3
)
dt
2
=
M
1
−
M
12
−
M
13
J
1
−
M
13
−
M
3
J
3
.
(4)
После подстановки выражений для моментов сил упругости (2) в
уравнения (4) получим
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2012. № 4 89


