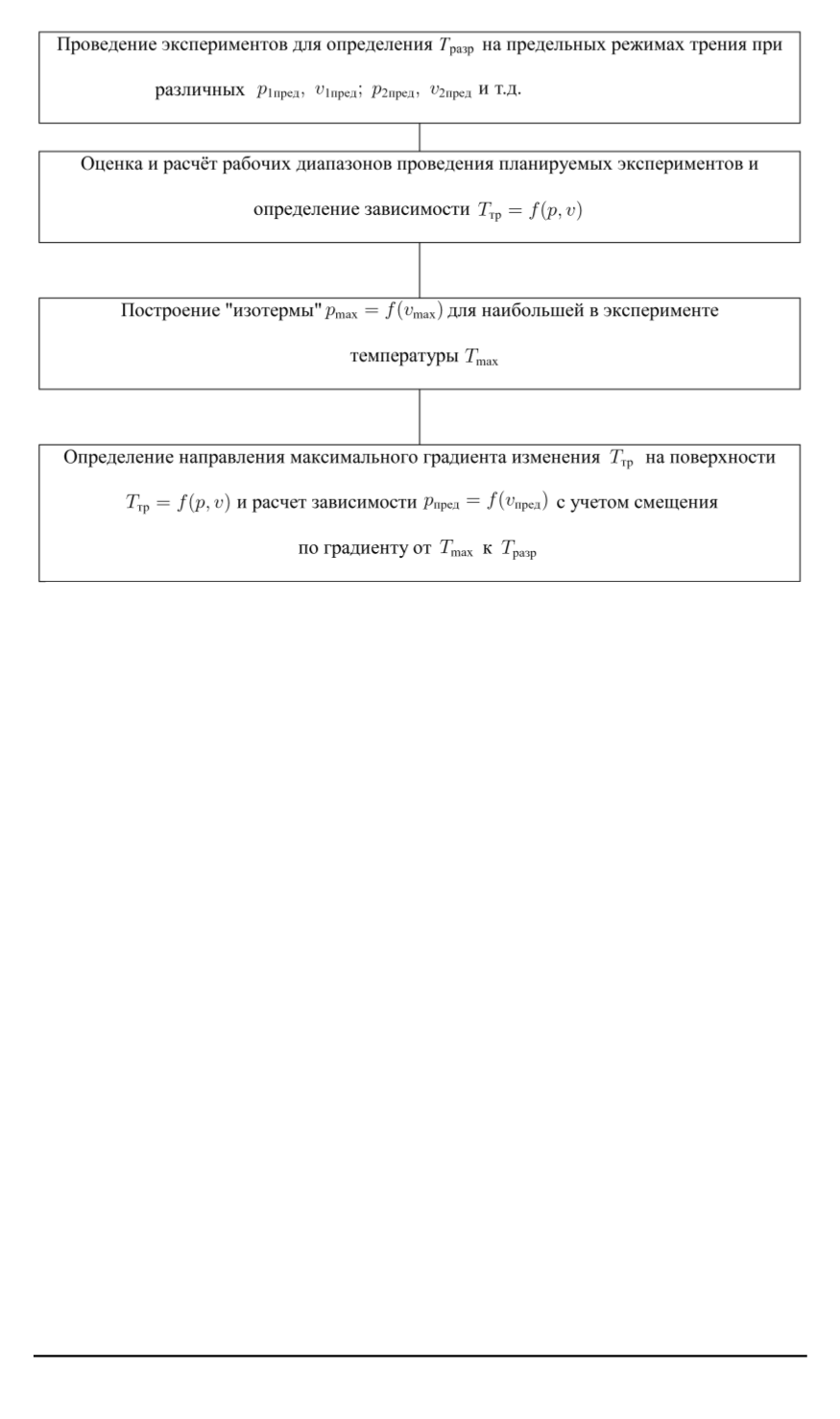
Рис. 3. Алгоритм нахождения предельных режимов трения
математическая модель, адекватность которой не отвергается при
уровне значимости
α
= 0
,
05
:
Т
тр
= 119
,
35 + 10
,
26
v
+ 0
,
037
N
+ 0
,
19
vN.
(5)
С учетом измеренной после опыта на контробразце площади пятна
контакта уравнение (5), записанное в универсальной форме, приняло
вид
Т
тр
= 119
,
35 + 10
,
26
v
+ 0
,
065
р
+ 0
,
335
v
р
.
(6)
Корректность полученных зависимостей была проверена на стен-
де шайба–диск [5] для ТСП типа Molykote7409 (обработка основы —
перекрестное шлифование, материал образцов — закаленная сталь 60
— НV
30
ВО
/НV
30
НО
= 770/780). Был осуществлен планируемый экспери-
мент второго порядка типа ЦКРУП.
В результате проведения эксперимента и обработки полученных
данных была рассчитана следующая математическая модель второго
порядка:
Т
тр
= 67
,
27
−
98
,
96
v
+ 0
,
464
р
+ 6
,
42
р
v
−
0
,
011
p
2
.
(7)
Таким образом, получены три математические модели зависимости
Т
тр
=
f
(
р
, v
)
для различных схем трения и диапазонов варьирования
факторов (табл. 2).
52 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2011. № 3


