В настоящей работе рассмотрена пеленгация на основе знакового
взаимокорреляционного метода для определения угла пеленга движе-
ния человека относительно опорной плоскости системы.
В экспериментальных исследованиях запись звуков проводилась в
натурных условиях с помощью пакета SoundForge 7.0 (см. рис. 1),
А
1
и
А
2
— микрофоны, разнесенные по базе на расстояние
d
= 20
см.
Тогда
Δ
l
=
d
sin
ϕ
n
,
Δ
τ
= Δ
l/V
зв
— задержка сигнала в одном из ка-
налов стереосистемы,
f
= 44
кГц =
44
∙
10
3
Гц — частота дискретизации
сигнала,
Δ
дискр
=
1
f
= 23
∙
10
−
6
c — шаг дискретизации.
Эксперименты проводились в летнее время при температуре возду-
ха
30
◦
С, давлении 746 мм рт. ст., влажности воздуха 35% (без осадков).
Было проведено по 30 экспериментов для углов
0
◦
(человек шел пря-
мо на систему),
45
◦
и
70
◦
. Человек передвигался неспешным шагом,
коэффициент усиления микрофонов — 75, микрофоны расположены
на высоте
h
= 44
см от земли. Все шаги в сторону системы начи-
нались с расстояния 7 м и прекращались за 2 м до нее (по радиусу).
Исследовали возможность определения угла пеленга в горизонтальной
плоскости на уровне микрофонов.
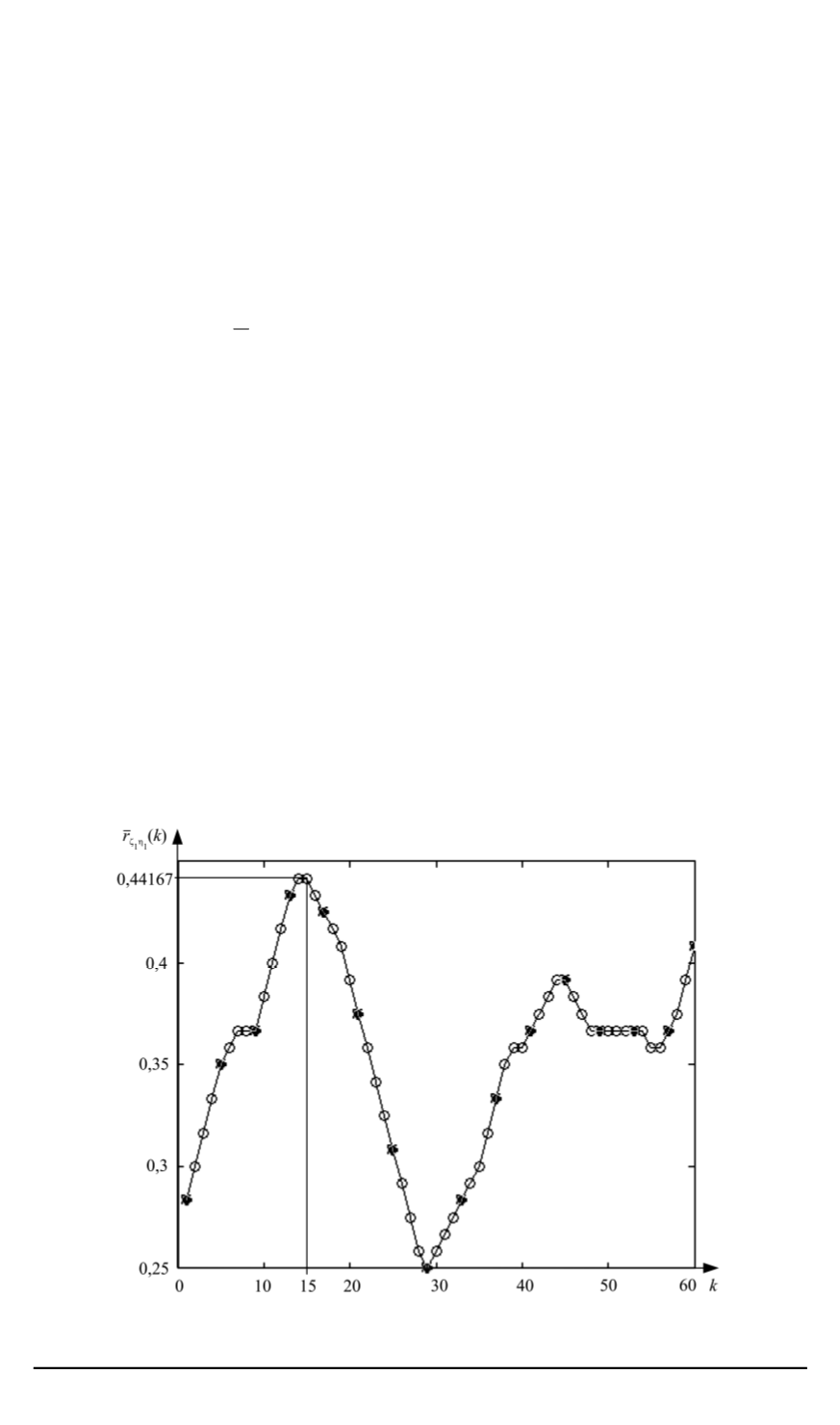
В среде пакета MatLab 6.5 к отрезкам реализаций длиной 376 от-
счетов левого и правого каналов применялась формула (9) и рассчиты-
валась знаковая взаимокорреляционная функция. Реализации сигналов
ζ
1
(
t
)
и
η
1
(
t
)
содержат значения [0, 1]. Определяли оценку знаково-
Рис. 4. График оценки взаимокорреляционной функции для отрезка реализации
сигнала длиной 376 отсчетов, когда человек идет к системе под углом
45
◦
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 3 73


