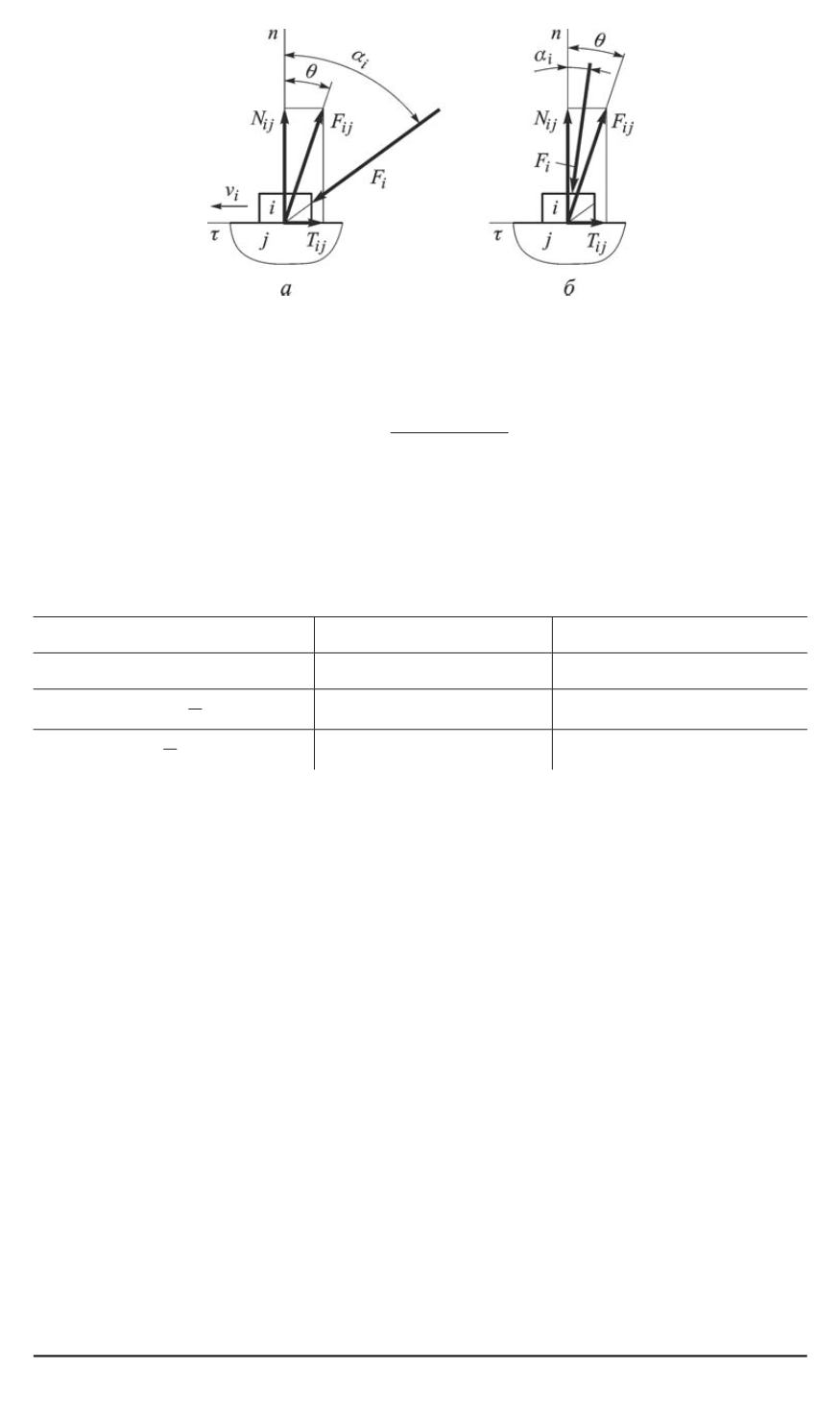
Рис. 2. Схема сил в клиновом механизме при прямом (
а
) и обратном (
б
) ходах
При обратном ходе знак перед углом трения меняется (рис. 2,
б
):
η
21
=
tg (
γ
−
2
θ
)
tg
γ
.
(3)
Условия возможности прямого и обратного хода механизма в зави-
симости от угла
γ
приведены в табл. 2.
Таблица 2
Возможность прямого и обратного хода механизма в зависимости от угла
γ
Угол
γ
Прямой ход
Обратный ход
γ <
2
θ
Возможен
Невозможен
2
θ < γ <
π
2
−
2
θ
Возможен
Возможен
γ >
π
2
−
2
θ
Невозможен
Возможен
При
γ <
2
θ
, т.е. при невыполнении условия работоспособности
обратный ход будет невозможен: движущая сила
F
2
, сколь бы велика
она ни была, не может осуществить его даже при отсутствии силы со-
противления
F
1
. Наступает самоторможение при обратном ходе, кото-
рое “используется в клиновых соединениях, а также в эксцентриковых
зажимах, винтовых домкратах и др.” [3, с. 241]. Здесь же отмечено,
что “обратный ход был бы возможен, если силу
F
1
сделать также
движущей, направив ее вверх. Тогда она будет вытаскивать клин
1
вверх, помогая движущей силе
F
2
осуществлять обратный ход”. Од-
нако если обе силы, приложенные как к входному, так и выходному
звеньям, являются движущими, можно ли такой режим движения на-
зывать обратным ходом?
Ответ на этот вопрос выходит за рамки учебной литературы и тре-
бует обращения к специальной литературе. Описание данного режима
движения содержится в работах профессора В.Л. Вейца, который отме-
чает, что из-за большого трения установившееся равновесное движе-
ние самотормозящихся механизмов возможно, если ведущими будут
30 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2013. № 4


