














 2 / 7
2 / 7

Г.А. Тимофеев, Н.Н. Барбашов
42
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2017. № 1
Зацепление зубьев гибкого и жесткого колес в зонах зацепления волновой пере-
дачи рассматривается в обращенном движении как внутреннее эвольвентное
зацепление колес
z
ж
и
z
у
с малой разностью чисел зубьев. Профиль зубьев гибко-
го колеса в зоне зацепления соответствует профилю зубьев условного (расчет-
ного) колеса, ось вращения которого совпадает с осью вращения деформирую-
щих дисков генератора волн (рисунок).
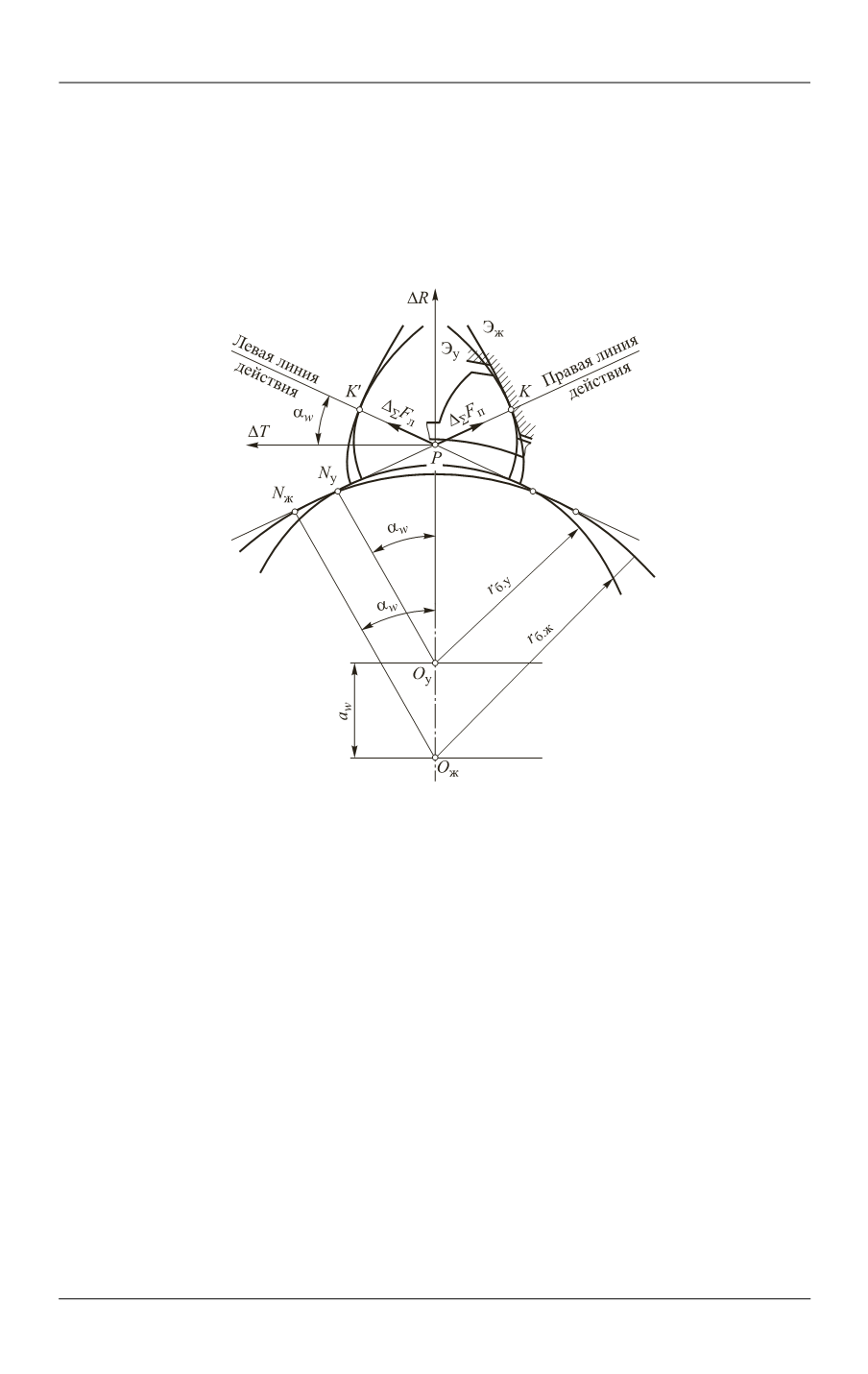
Геометрические параметры двухпрофильного волнового зацепления
При работе волновых передач с двухпрофильным зацеплением погрешности
изготовления деталей так же, как и при однопрофильном зацеплении, создают
избыточные перемещения сопряженных профилей зубьев ведомого колеса. Эти
перемещения отсчитываются по линиям действия сопряженных профилей и по-
этому называются действующими ошибками. Поскольку боковые поверхности
зубьев гибкого и жесткого колес представляют собой эвольвенты, то линиями
действия являются общие касательные к основным окружностям условного и
жесткого колес, радиусы которых обозначены соответственно через
б.y
r
и
б.ж
.
r
Общая нормаль соприкасающихся в точке
K
правых эвольвент
у.п
Э
и
ж.п
Э
называется правой линией действия, а нормаль соприкасающихся в точке
K
′
левых эвольвент
у.л
Э
и
ж.л
Э
соответственно — левой линией действия.
Причиной образования действующих ошибок в зацеплении (как по правой,
так и по левой линиям действия) является наличие в процессе обработки и
сборки зубчатых колес геометрического и кинематического эксцентриситетов.
Эти эксцентриситеты гибкого и жесткого колес при двухволновом зацеплении