














 7 / 11
7 / 11

Задачи решаются в соответствии со следующими критериями:
— точность конфигурации группы;
— минимизация и обеспечение равномерности расхода топлива
группой КА;
— минимизация информационного трафика и затрат вычислитель-
ных ресурсов для управления конфигурацией;
— унификация состава бортового оборудования и программно-
математического обеспечения группы КА.
Рассмотрим некоторые задачи определения облика многоуровне-
вых структур.
Определение полномочий лидера.
В зависимости от степени вли-
яния лидера на полет ведомых КА возможны следующие варианты
структуры.
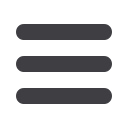
“Жесткая” иерархическая
. КА-лидер определяет центральную ор-
биту группы, обладает информацией о конфигурации и управляет ей
(рис. 5).
На основе информации о пространственном положении всех аппа-
ратов группы КА-лидер рассчитывает и транслирует параметры ма-
невра ведомых КА:
U
i
(
t
) =
f
(
r
B
i
(
t
)
, r
L
i
(
t
))
, i
= [1
, . . . , n
]
,
где
U
i
(
t
)
— вектор параметров управления для ведомого КА;
r
B
i
(
t
)
—
параметры фактического пространственного положения и скорости
движения ведомого КА;
r
L
i
(
t
)
— параметры пространственного по-
ложения и скорости движения КА-лидера;
n
— число ведомых КА в
группе.
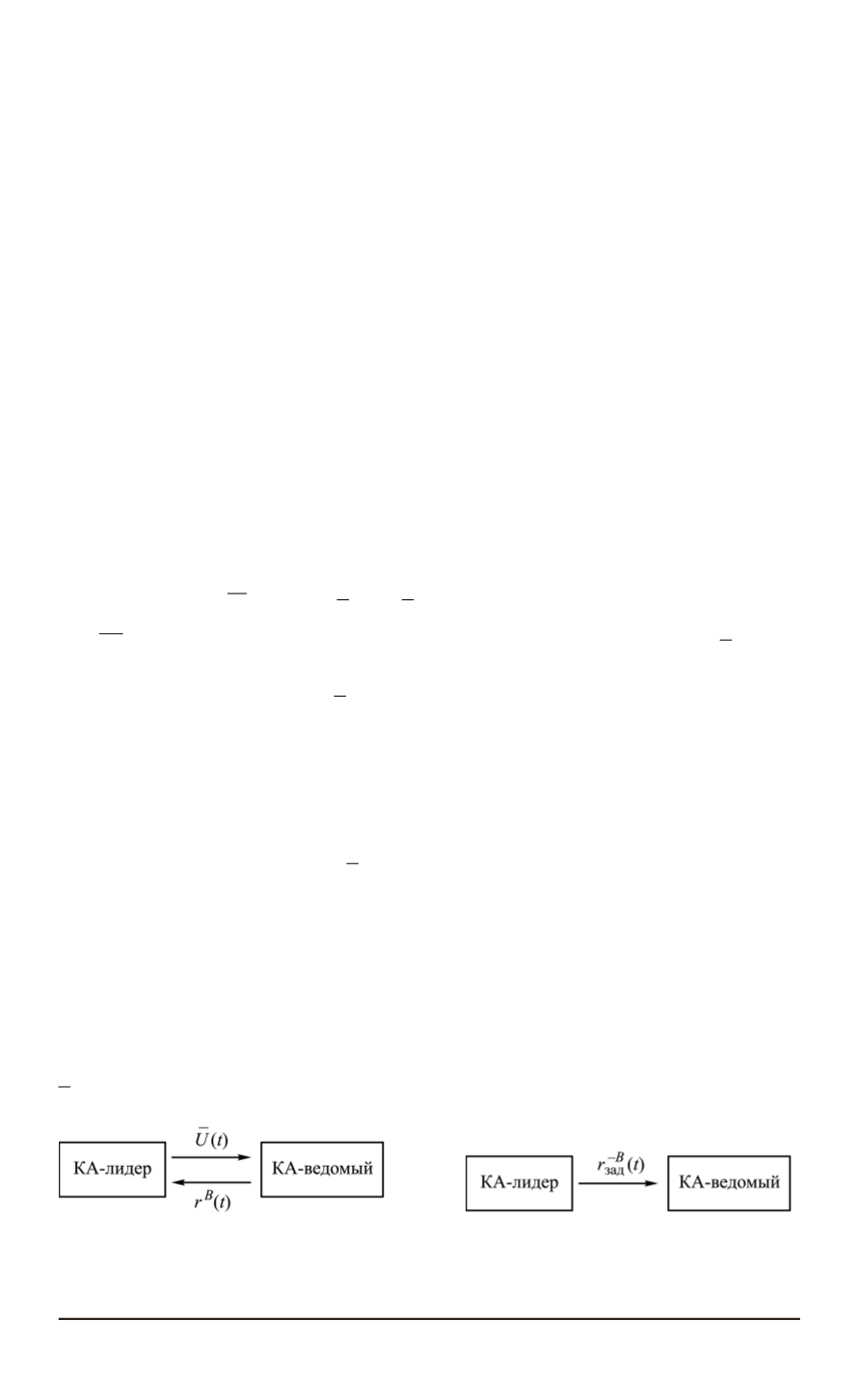
Иерархическая
(рис. 6). КА-лидер определяет центральную орби-
ту группы, обладает информацией о конфигурации. Ведомые КА на
основе получаемой от лидера информации о требуемом (заданном)
относительном положении
r
B
зад
(
t
)
, определяемых параметрах фактиче-
ского пространственного положении и составляющих скорости полета,
рассчитывают и совершают маневр.
Иерархическая “упрощенная”.
Каждый КА группы обладает ин-
формацией о конфигурации группы и заданном положении относи-
тельно лидера (рис. 7).
Лидер транслирует информацию о своем текущем пространствен-
ном положении и скорости полета, времени измерения параметров
r
L
зад
(
t
)
.
Рис. 5. Схема “жесткой” иерар-
хической структуры управления
группой КА
Рис. 6.
Схема иерархической
структуры управления группой
КА
28 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2015. № 6