














 6 / 11
6 / 11

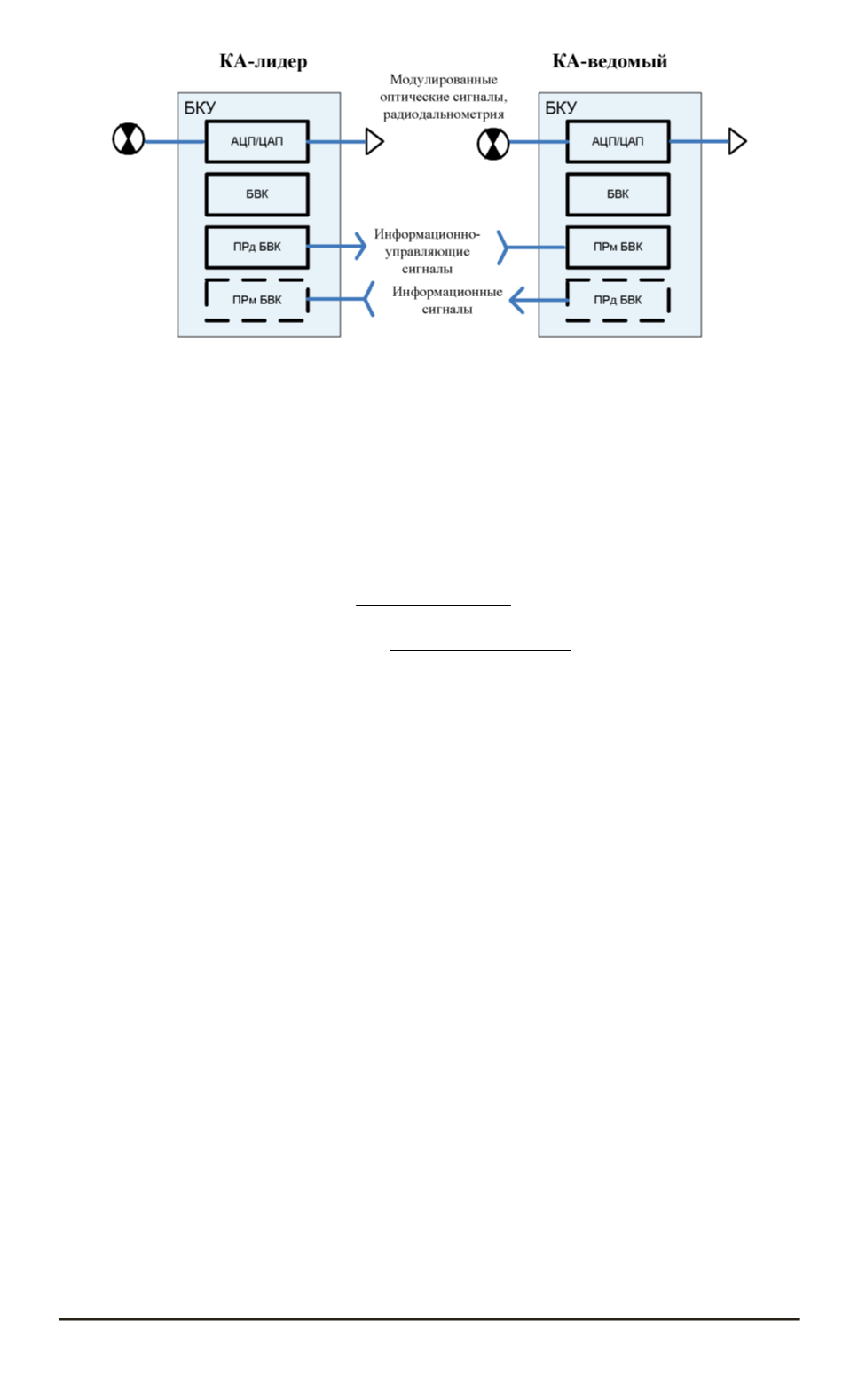
Рис. 4. Состав бортовых комплексов управления КА при использовании
оптико-электронных и радиотехнических систем позиционирования
Использование ГЛОНАСС/GPS навигации допускает точность по-
зиционирования КА в группе до 1 м, при этом расстояние между КА
не ограничивается.
Погрешность
ε
i
положения в конфигурации КА
i
-го уровня иерар-
хии при варианте системы управления (см. рис. 4) может быть опре-
делена по выражению
ε
i
=
q
Δ
2
изм
i
+ Δ
2
абс
i
−
1
,
Δ
изм
i
=
q
Δ
2
пел
+ Δ
2
уст
+ Δ
2
ф
,
(5)
где
Δ
изм
i
— погрешность измерения положения КА
i
-го уровня относи-
тельно вышестоящего бортовыми средствами;
Δ
абс
i
−
1
— погрешность
пространственного положения вышестоящего КА. Укрупненно
Δ
изм
i
состоит из следующих составляющих:
Δ
пел
— погрешности пелен-
гации из-за влияния шумовых помех сигнала и приемника сигнала,
погрешности определения направления и дальности;
Δ
уст
— ошибки
установки приемников сигнала относительно осей КА;
Δ
ф
— прочих
погрешностей вследствие влияния на бортовую аппаратуру КА темпе-
ратуры, вибраций и т.д.
Если предположить, что каждая из составляющих погрешности
Δ
изм
i
равна
1
0
, то cуммарная погрешность
Δ
изм
i
= 0
,
028
◦
, что на
дальности между КА в 1 км составляет 0,5 м. Для уменьшения со-
ставляющей
Δ
абс
i
−
1
надо минимизировать число уровней иерархии и,
соответственно, общее число “КА-ориентиров”.
Многоуровневое управление группой КА.
В качестве основных
задач при определении облика многоуровневой системы управления
группой можно выделить:
— определение полномочий лидера;
— правило назначения лидера, смены лидеров;
— определение лидеров группы, их взаимной подчиненности, рас-
пределение обязанностей между лидерами.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2015. № 6 27