














 4 / 11
4 / 11

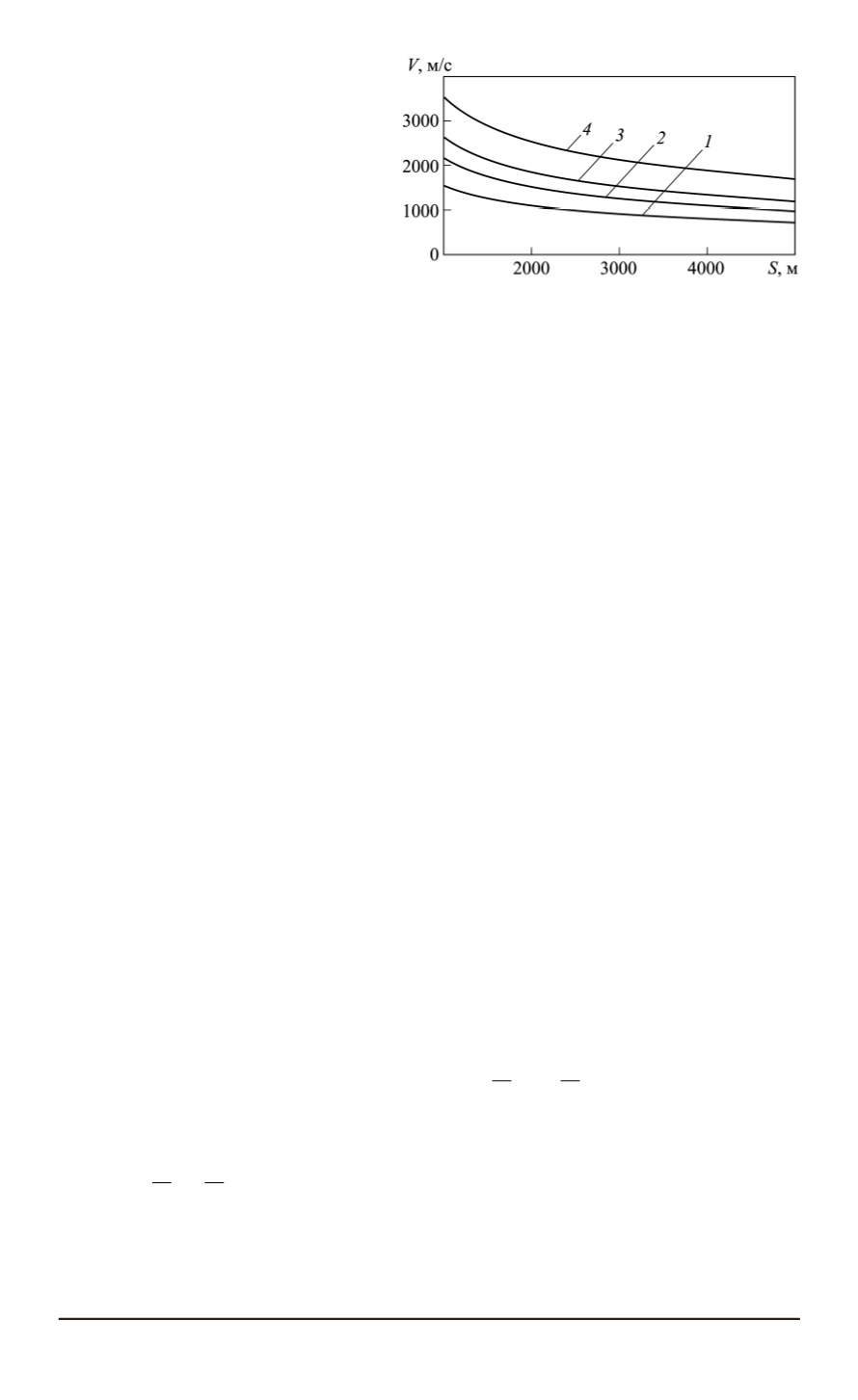
Рис. 2. Суммарное время формирования
конфигурации на витке двумя КА
где
ω
cp
1
, ω
cp
2
, ω
cp
n
— средние
угловые скорости на витке
разведенных по фронту КА;
Δ
B
ij
— разность в эксцентри-
ситетах орбит двух любых пар
i
и
j
КА из
n
штук,
А
— допуск.
Метод позволяет два ра-
за за виток формировать про-
странственно распределенную
группу КА. При приближении
к узловым точкам (точкам мак-
симального сближения орбит) “рой” будет смешиваться и далее пере-
страиваться в зеркальном порядке.
На рис. 2 приведены результаты моделирования времени форми-
рования конфигурации на витке двумя КА разведением их на макси-
мальные расстояния по фронту
S
с допусками 100, 200, 300 и 600 м
(кривые
1
,
2
,
3
и
4
соответственно). Средняя высота полета КА состав-
ляет 300 км, разность в высотах орбит в узловых точках — 100 м.
Метод характеризуется относительно небольшими затратами ха-
рактеристической скорости при поддержании конфигурации (в основ-
ном приходящимися на начальное разведение КА по орбитам).
Совместное или последовательное использование представлен-
ных методов
.
При необходимости кратковременного формирования
сложной конфигурации на основе более простой конфигурации КА,
расположенные на нескольких орбитах по второму методу, могут со-
вершить маневр временного перестроения, или при выходе из строя
части аппаратов группы и поддержании конфигурации по первому ме-
тоду возможен переход на более экономичный – второй метод.
Динамическое формирование конфигурации на основе решения
оптимизационных задач
. Метод предполагает постоянный расчет
взаимного положения КА и выдачу импульсов в соответствии с раз-
личными критериями оптимизации. Например, при минимизации
взвешенных потерь по точности взаимного положения и расхода топ-
лива постановка задачи описывается выражением
J
i,j
=
k
1
(
G
i
+
G
j
) +
k
2
T
Z
0
(
R
i,j
−
R
∗
i,j
)
2
dt,
(4)
где
k
1
, k
2
— весовые коэффициенты;
G
i
, G
j
— расходы топлива
i
-го и
j
-го КА;
R
i,j
,
R
∗
i,j
— фактическое и требуемые относительные рассто-
яния.
В частности, представляется перспективным двухэтапный равно-
весно-арбитражный алгоритм последовательной оптимизации ста-
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2015. № 6 25