














 5 / 11
5 / 11

бильно-эффективного компромисса в форме Нэш – Парето на осно-
ве теории оптимизации многообъектных многокритериальных си-
стем [4].
Навигация и управление группой КА.
Возможны следующие
варианты решения навигационной задачи и управления конфигураци-
ей группы КА.
Независимое управление каждым КА
и выдерживание им апри-
ори заданной собственной орбиты полета (одноуровневая структура
управления). В этом случае аппараты группы равноправны и идентич-
ны по оборудованию системы управления.
Многоуровневое управление
. Подразумевает специализацию аппа-
ратов группы: наличие лидера (лидеров), определяющих центральную
орбиту группы, и ведомых КА, поддерживающих заданное положение
относительно лидера для формирования пространственной конфигу-
рации.
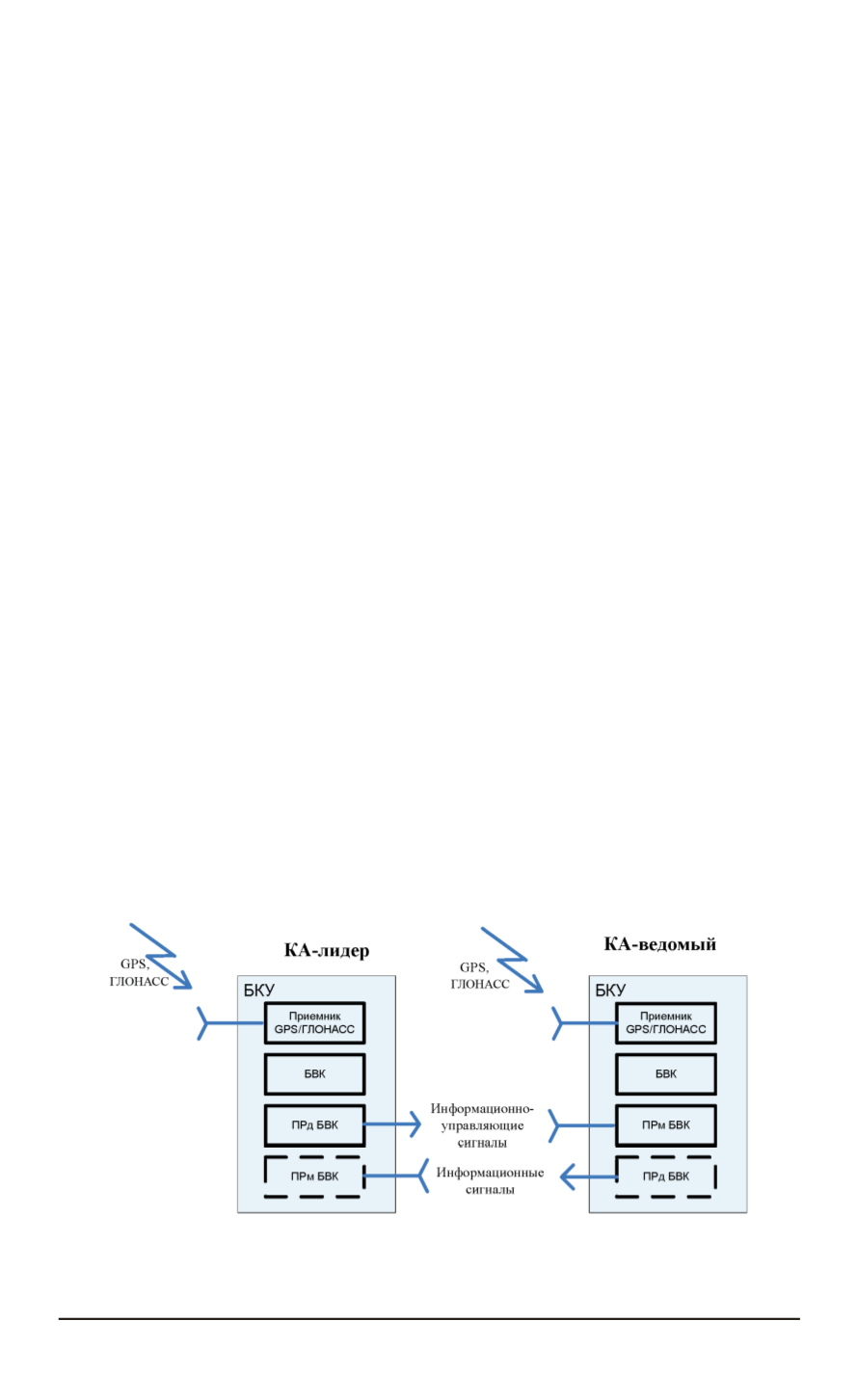
На рис. 3 и 4 приведены варианты построения системы управле-
ния КА — лидера и ведомого, в том числе и состав бортового обо-
рудования. Приняты следующие обозначения: БКУ — бортовой ком-
плекс управления, БВК — бортовой вычислительный комплекс, ПРм
и ПРд — приемник и передатчики данных БВК, включая антенно-
фидерное устройство. Штриховкой выделены блоки, которые могут
отсутствовать в зависимости от алгоритма управления группой.
Из рис. 3 следует, что основным источником информации о про-
странственном положении лидера и ведомых КА является бортовая
система спутниковой навигации. Другим вариантом (см. рис. 4) опре-
деления взаимного положения КА группы является использование ав-
тономных оптико-электронных и радиотехнических систем позицио-
нирования: оптических маяков (определение углового положения КА)
и радиодальномеров (определение расстояний между КА).
Рис. 3. Состав бортовых комплексов управления КА при использовании аппа-
ратуры спутниковой навигации
26 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2015. № 6