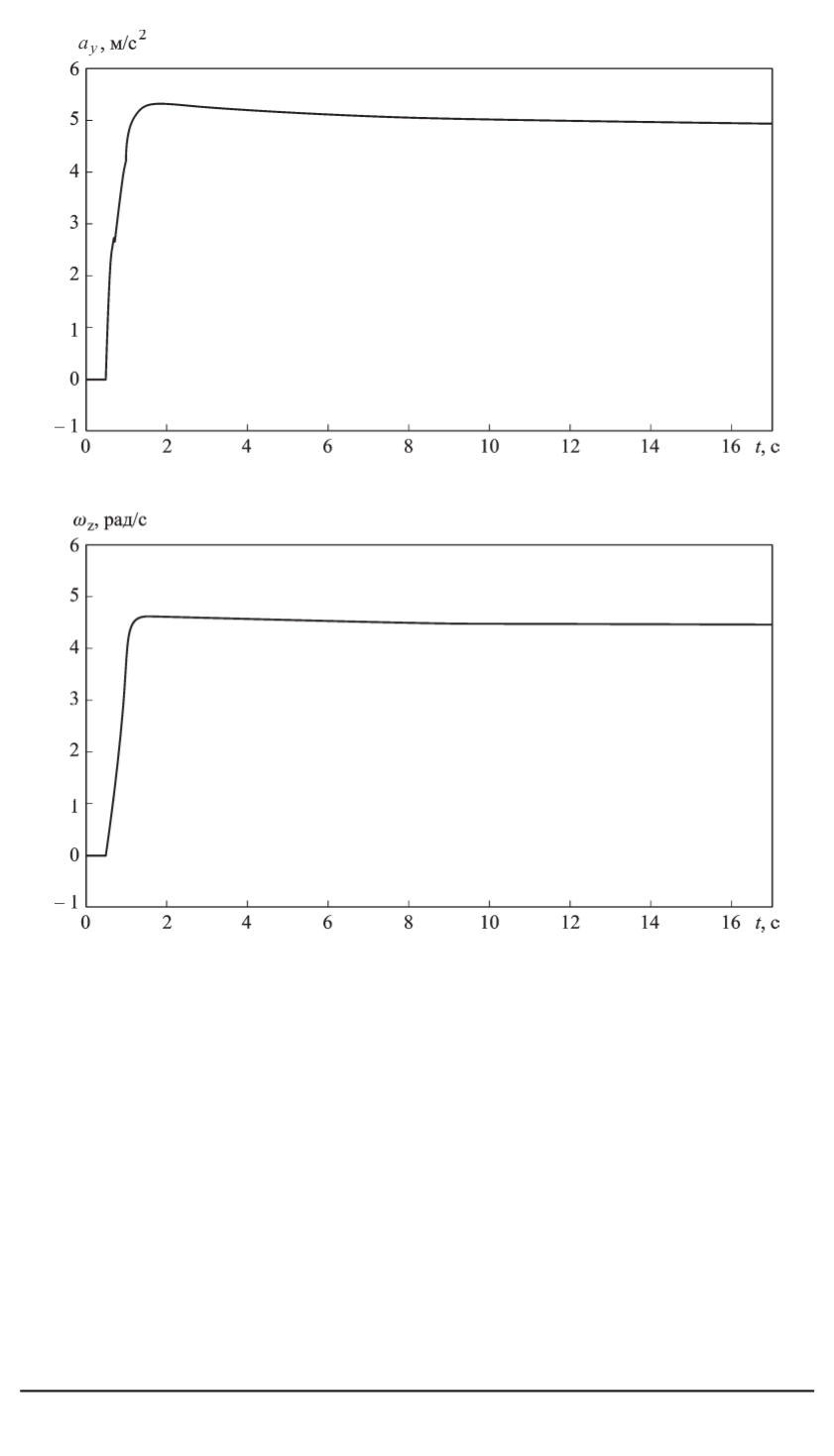
Рис. 10. Боковое ускорение
Рис. 11. Угловая скорость поворота центра масс
n
≥
1
на колесах второй оси наблюдается смена направления поворо-
таколес при определенном положении полюсаРУ набазе автомобиля
вследствие пересечения линии перпендикулярак плоскости вращения
колесаи линии перемещения полюсаповоротаРУ вдоль базы авто-
мобиля (см. рис. 12,
n
= 2
). Подбором значения
n
для конкретного
исследуемого объекта это явление исключается. Для рассматривае-
мого случая показатель
n
= 1
/
2
. Снижение данного показателя до
минимальных значений отрицательно сказывается на динамике систе-
мы, так как увеличивается чувствительность рулевого управления в
зонах, соответствующих малым углам поворота рулевого колеса, что
снижает безопасность управления при высоких скоростях движения.
114 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2


