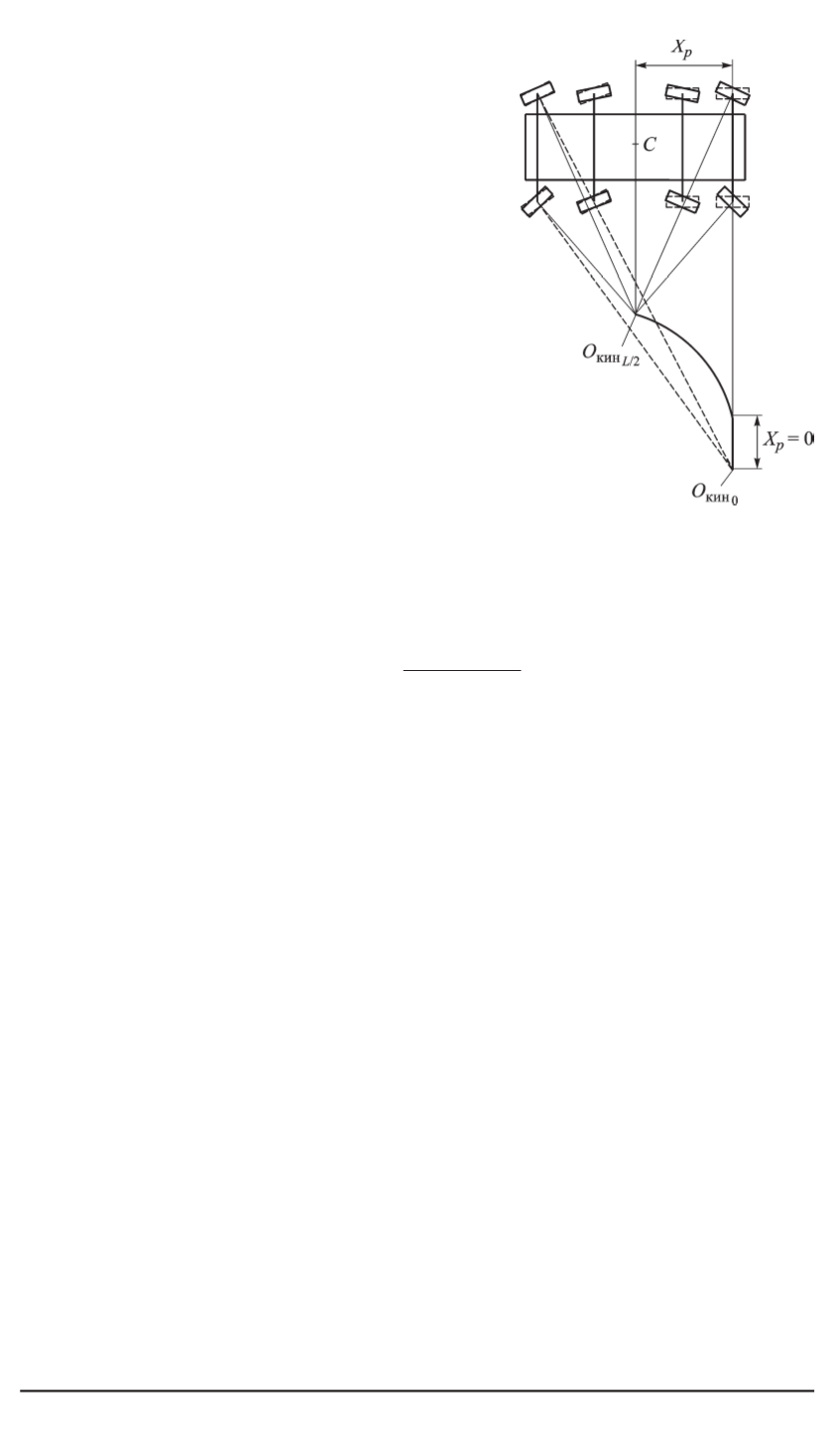
Рис. 7. Схема поворота КМ
при “веерном” законе ВРУ
авторов понятна, однако необходимость
такого решения для многоосной техни-
ки вызывает сомнение. Можно отметить,
что с увеличением числаосей автомобиля
опасность потери устойчивости при нача-
ле переходного процессаснижается. При
маневрировании на малых скоростях по-
ворот всех колес в одну сторону при ма-
лых углах поворотарулевого колесатакже
не способствует повышению эффективно-
сти управления транспортным средством.
Синфазный поворот при малых углах по-
воротаруля скорее необходим для неболь-
ших двухосных легковых автомобилей.
По результатам многочисленных вычи-
слительных экспериментов был сформу-
лирован закон изменения положения по-
люса рулевого управления от задающего
угладля автомобиля 8
×
8:
X
p
=
L/
2
θ
p
−
θ
зап
θ
max
−
θ
зап
n
.
(4)
При этом на ВРУ накладываются следующие ограничения: при
значениях углаповоротазадающего колеса
θ
зап
до 5
◦
полюс рулевого
управления находится на задней (последней) оси автомобиля (рис. 7);
в то время, когдаполюс РУ лежит заосью №3, колесаэтой оси оста-
ются строго в нейтральном положении, поворот их начинает реализо-
вываться только при достижении полюсом РУ координаты положения
оси №3 по базе (см. рис. 7). Таким образом, достигается устойчи-
вость против заноса при высоких скоростях движения и обеспечива-
ется устранение смены направления в углах поворота колес третьей
оси.
При увеличении числаосей колесной машины больше четырех
угол
θ
зап
должен постепенно уменьшаться до нулевого значения. Зад-
ние оси, углы поворотаколес которых будут равны нулю, покаполюс
РУ не достигнет их координат по базе автомобиля, будут препятство-
вать началу заноса задней оси. Соответственно, чем больше осей на-
ходится в таком режиме, тем выше устойчивость автомобиля в целом.
Далее представлены результаты численного моделирования дви-
жения колесной машины (КМ) с индивидуальным приводом всех дви-
жителей [7, 8] с реализацией разработанного закона ВРУ колесами в
целях определения предельной скорости выполнения маневра “пово-
рот
R
= 25
м”.
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2 111


