Реализация алгоритма этого метода на ЭВМ в реальном масшта-
бе времени позволяет оперативно проводить анализ колебательных
процессов всех опор агрегата на машине, определяя характеристики
компонент
{
A
i
}
, имеющих частоту
n
вращения агрегата.
Наиболее просто элементы матрицы
{
D
j
}
определяются с помо-
щью сформированной по результатам измерений матрицы
{
A
i
}
для
машин, содержащих один ротационный агрегат (например, вентиля-
тор), колебания опор которого на частоте
n
определяются практически
только характеристиками его неуравновешенности. То же имеет ме-
сто, если возмущения с частотой
n
вращения ротора, балансируемого
на машине, не возбуждает работа других ее агрегатов или у машины
имеется возможность индивидуального привода вращения, баланси-
руемого на месте агрегата. Более сложно решается задача для много-
агрегатных машин, в которых возмущения с частотой
n
от неуравнове-
шенности балансируемого агрегата генерируются другими (сторонни-
ми) источниками. Решение задачи выделения в таких машинах гармо-
ники
A
i
, определяемой только неуравновешенностью балансируемо-
го агрегата, выполненное на кафедре “Теория механизмов и машин”
ДГТУ (г. Ростов-на-Дону) — предмет отдельной публикации. Далее
будем полагать реализованной возможность измерения характеристик
— элементов матрицы
{
A
i
}
, определенных только характеристиками
— элементами матрицы
{
D
j
}
балансируемого на месте ротационного
агрегата машины.
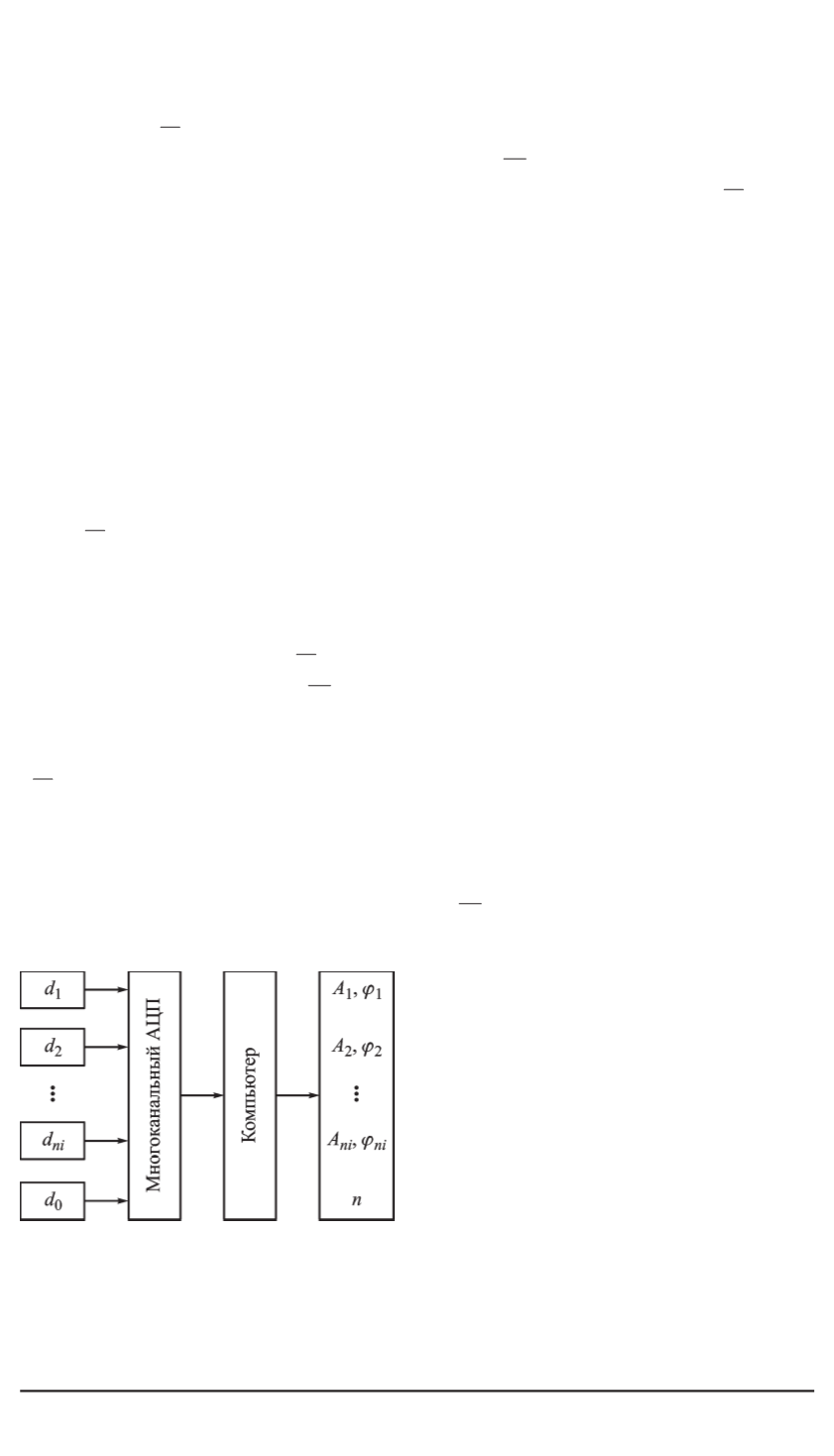
На рис. 1 приведена структурная схема измерения характеристик
{
A
i
}
колебаний
n
i
опор ротационного агрегата на машине, где
d
i
,
i
= 1
, . . . , n
i
, — датчики вибраций, установленные у всех опор ба-
лансируемого агрегата;
d
o
— отметчик фазы гармоник с частотой
n
вращения агрегата на машине.
Для идентификации дисбалансов
{
D
j
}
в
j
= 1
, . . . , n
j
плоскостях
коррекции
n
i
-опорного ротационного агрегата на машине (
n
j
=
n
i
)
Рис. 1. Структурная схема измерения
характеристик колебаний опор агре-
гата на машине
с использованием устройства, реа-
лизующего схему, приведенную на
рис. 1, предложена следующая тех-
нология:
а) установить на опорах агрега-
та (или вблизи опор)
n
i
датчиков
d
i
колебаний и отметчик фазы
d
o
.
Проверить на дисплее компьютера
наличие сигналов от датчика и от-
метчика фазы;
б) установить кинематику при-
вода балансируемого агрегата ма-
шины так, чтобы при его вращении
42 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2012. № 2


