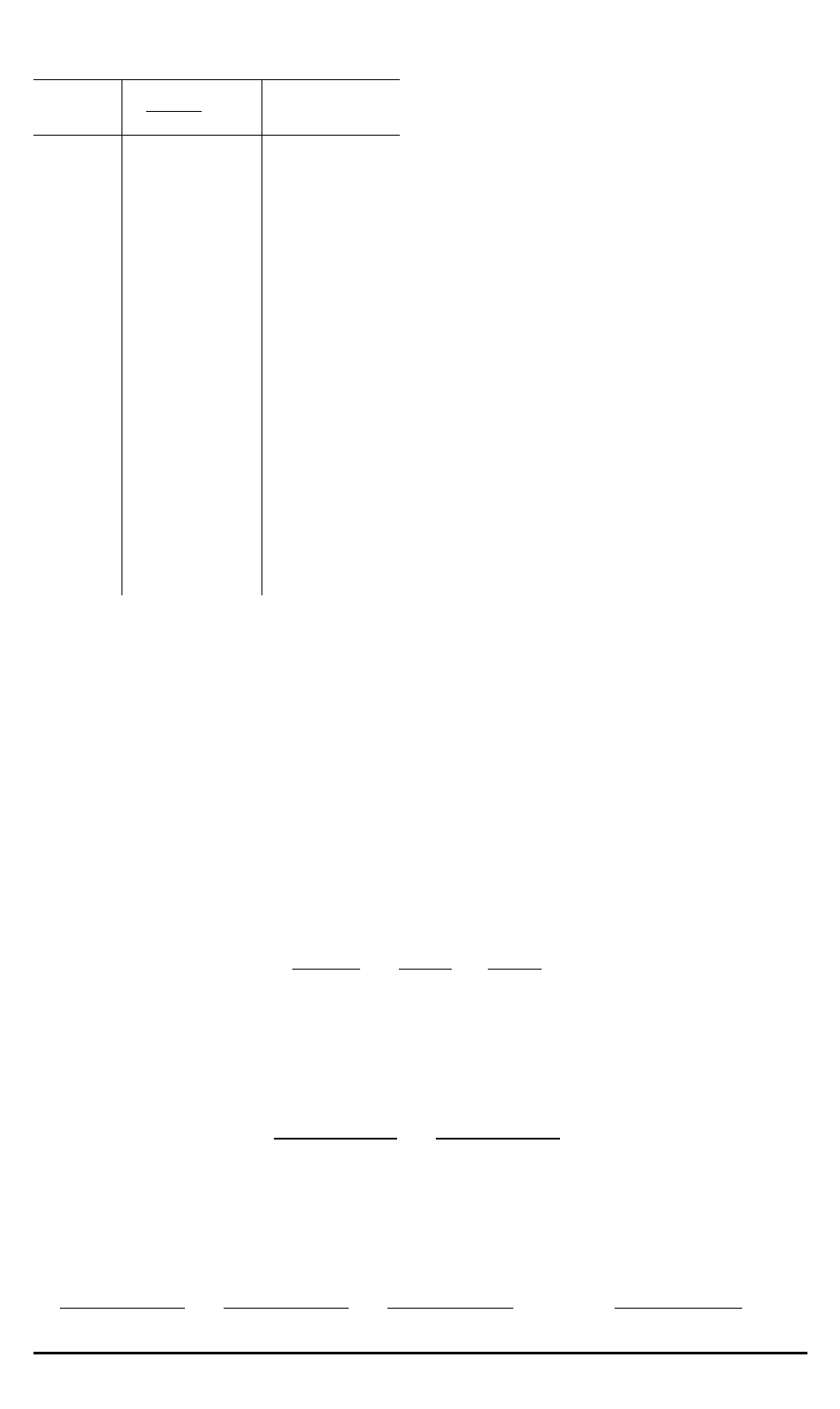
Таблица 2
r
a
, м
N
fa
бл
V
а
,
кH
P
а
бл
, кH
0,61
14,88
10,02
0,59
16,45
31,37
0,57
18,72
48,16
0,55
21,42
55,44
0,53
24,45
58,96
0,51
27,79
60,68
0,49
31,44
61,81
0,47
35,43
62,21
0,45
39,79
62,61
0,43
44,55
62,61
0,41
49,77
62,48
0,39
55,52
62,35
0,37
61,87
62,05
0,35
68,93
61,62
0,33
76,84
61,51
При необходимости реализа-
ции максимальных тягово-сцепных
свойств алгоритм управления си-
стемой силового привода колес
должен отслеживать в изменяю-
щихся дорожных условиях величи-
ну мощности, подводимую к мо-
стам, в зависимости от характе-
ристики взаимодействия колеса с
грунтом, т.е. от величины
γ
шг
i
,
обеспечивая при этом на каждом
ведущем мосту максимальную си-
лу тяги (
Р
м max
)
.
В общем случае управле-
ние трансмиссией должно осуще-
ствляться по закону регулирова-
ния, обеспечивающему минималь-
ные сопротивления движению ав-
томобиля.
Определим условие минимума
потерь на сопротивление движению, в которое входят величины сил
тяги мостов автомобиля.
Рассмотрим два моста
n
-осного автомобиля [3]. Будем считать,
что сумма сил тяги этих двух мостов постоянна и зависит только от
перераспределения сил между этими мостами (не зависит от других
мостов):
P
Σ1
,
2
=
P
м1
+
P
м2
=
const
.
(4)
Удельная мощность сопротивления движению мостов
1
и
2
N
f
м
1
,
2
V
a
=
N
f
м
1
V
a
+
N
f
м
2
V
a
.
(5)
На основании выражений (4) и (5) получим условие минимума
потерь на сопротивление движению:
d
(
N
f
м
1
/V
a
)
dP
м1
=
d
(
N
f
м
2
/V
a
)
dP
м
2
.
(6)
Поскольку вместо мостов
1
и
2
могла быть взята любая пара мо-
стов, то условие (6) можно записать как
d
(
N
f
м
1
/V
а
)
dP
м
1
=
d
(
N
f
м
2
/V
а
)
dP
м2
=
d
(
N
f
м
3
/V
а
)
dP
м3
=
. . .
=
d
(
N
f
м
n
/V
а
)
dP
м
n
.
(7)
76 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2005. № 4


