приложить некоторый движущий момент, превышающий максималь-
ное значение
M
max
ост
, которое составляет примерно 1/3 максимального
момента сил тяжести неуравновешенного люка
|
M
G
|
max
=
gm
1
l
OB
.
На преодоление этого остаточного момента сопротивления движению
и должен быть направлен выбор мощности двигателя. При уравнове-
шивании люка работа по его перемещению в вертикальное положение
уменьшится и составит 1/3 часть работы открытия неуравновешен-
ного люка, что позволяет адекватно снизить номинальную мощность
установленного двигателя гидропривода. Однако возможен вариант
улучшения динамических качеств ПТМ при сохранении номинальной
мощности.
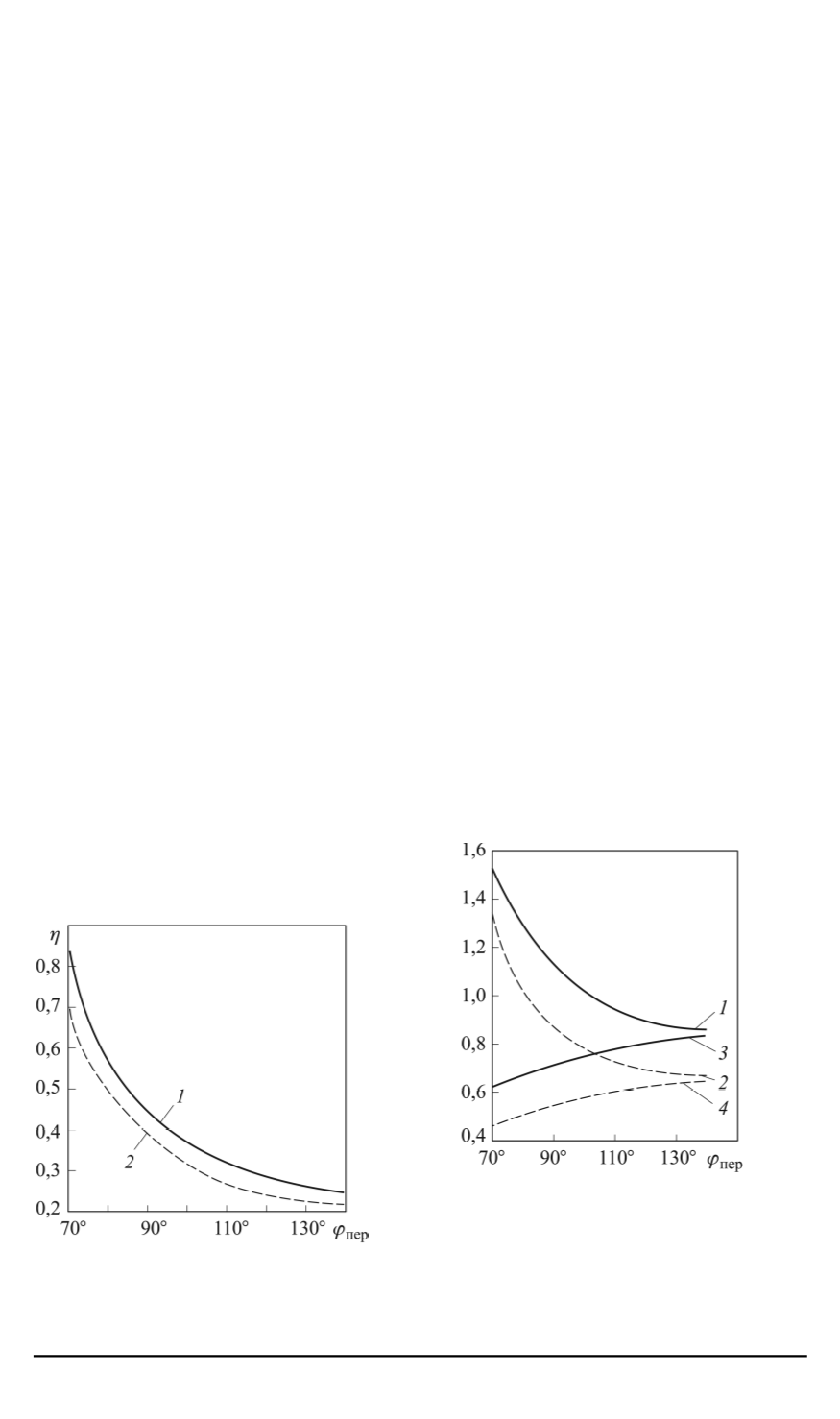
Анализ результатов моделирования.
Построение зависимостей
параметров ПТМ от углового момента переключения с разгона на тор-
можение осуществлялось по приведенным выражениям путем моде-
лирования в системе MathCAD [6]. На рис. 4 показана зависимость
изменения циклового КПД от углового момента переключения при
выборе коэффициентов запаса пускового момента
k
= 1
,
2
(кривая
1
)
и
k
= 1
,
5
(кривая
2
). В обоих случаях цикловой КПД снижается при
увеличении угла переключения, что можно объяснить увеличением
скорости в конце разгона и кинетической энергии перед торможени-
ем. Как следствие, растут потери энергии при торможении.
На рис. 5 представлены результаты моделирования динамических
показателей привода люка. Эти результаты противоречивы, так как
описывают изменение времени цикла подъема люка
Т
цикл
(кривые
1
и
Рис. 4. Графики зависимости ци-
клового КПД от углового момента
переключения
Рис. 5. Изменение динамических показа-
телей привода люка:
времени цикла подъема люка
Т
цикл
(кри-
вая
1
при
k
= 1
,
2
и кривая
2
при
k
= 1
,
5
) и
времени разгона
Т
разг
(кривая
3
при
k
= 1
,
2
и кривая
4
при
k
= 1
,
5
)
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение” 2014. № 1 107


