Рассмотрим эффект упругого восстановления упруговязкого тела
после снятия нагрузки, когда
σ
= 0
:
Е
ε
+
η
dε
dt
= 0
.
(9)
Отсюда может быть определена деформация
ε
=
ε
0
е
−
t/θ
,
(10)
где
θ
=
η/
Е
— время запаздывания.
Элемент
3
— ползунок в механической модели упругопластично-
вязкого тела (см. рис. 9,
б
) — характеризуется наличием сил статическо-
го трения
F
ст
. При воздействии на ползунок силы
F < F
ст
он остается
неподвижным и начинает движение только при
F
>
F
ст
.
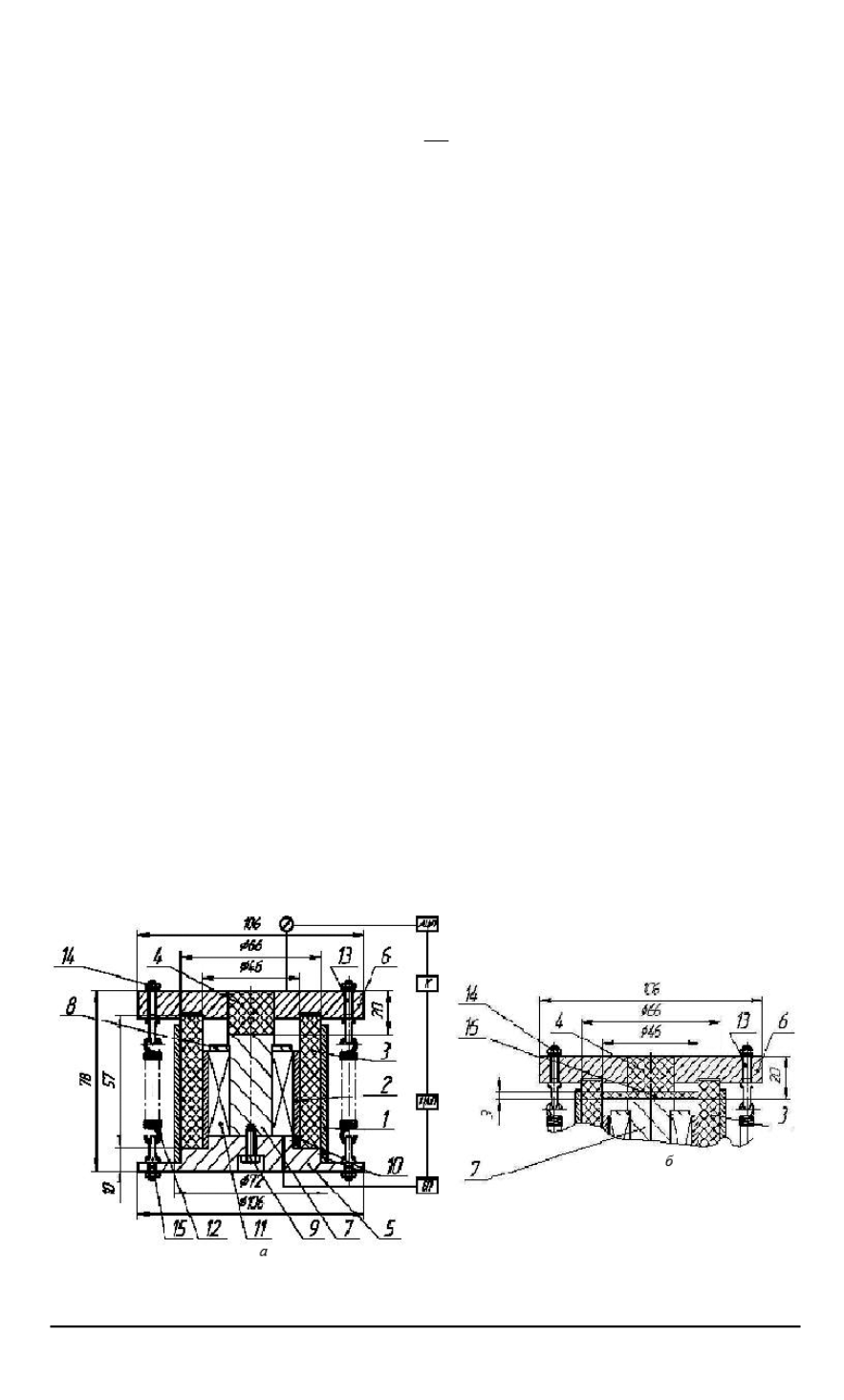
Описание МЭ-демпфера.
МЭ-демпфер (рис. 10,
а
) содержит огра-
ничивающие втулки
1
,
2
, втулки из магнитоэластика
3
,
4
, опору
5
,
перемещаемую платформу
6
из стали 20, сердечник
7
, фиксирующее
кольцо
8
, винт
9
, регулировочные винты
10
, электромагнитную ка-
тушку
11
и пружины
12
. Кроме того, МЭ-демпфер оснащен датчиком
перемещения и системой управления.
На электромагнитную катушку
11
с блока питания подается упра-
вляющий сигнал, вследствие чего возникает замкнутое магнитное по-
ле, проходящее через магнитоэластик. Замкнутая магнитная цепь обра-
зуется следующими элементами: сердечник
7
— цилиндрический маг-
нитоэластик
4
— платформа
6
— трубчатый магнитоэластик
3
— опора
5
— сердечник
7
. При действии магнитного поля на магнитоэластик маг-
нитные частицы выстраиваются вдоль поля, изменяя геометрические
размеры образца и его модуль Юнга. При этом платформа
6
переме-
щается по вертикальной оси.
Сигнал от емкостного датчика перемещения платформы
6
посту-
пает через АЦП в компьютер, сохраняется и отображается на экране
Рис. 10. Схема МЭ-демпфера со стальной (
а
) и дюралюминиевой (
б
) платфор-
мами
102 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2008. № 1


