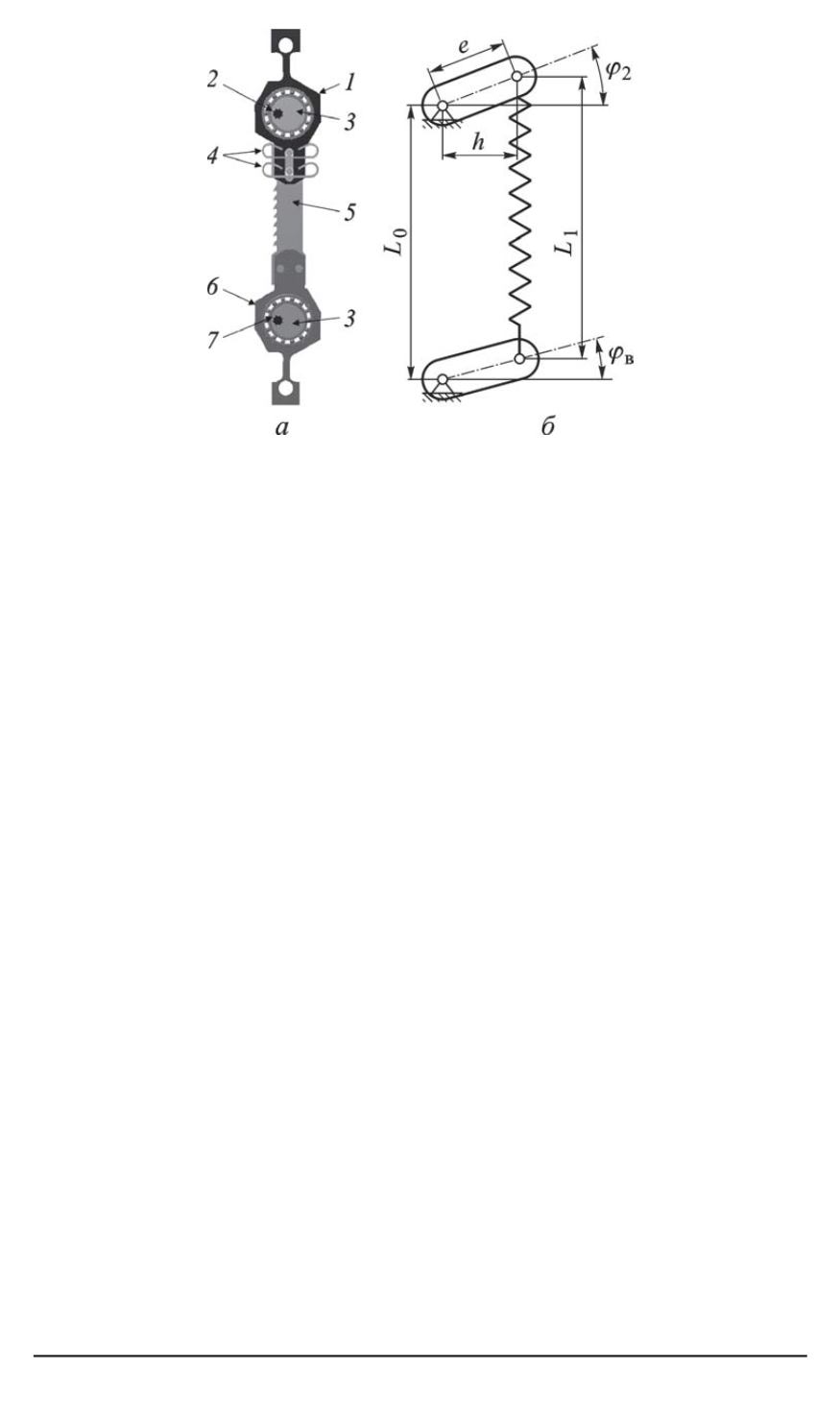
Рис. 2. Схема(
а
) и ра счетна я схема (
б
) пильного модуля:
1
и
6
— верхняя и нижняя корпусные детали,
2
и
7
— верхний (ведомый) и нижний
(ведущий) валы,
3
— эксцентрик,
4
— упругие элементы крепления пильного
полотна,
5
— полосовое пильное полотно
предварительного натяжения с эксцентриситетом, а также испытыва-
ют воздействие сил резания и сил инерции, возникающих вследствие
вращения валов. При анализе поведения пильных полотен исполь-
зуются основные соотношения механики деформируемого твердого
тела применительно к тонкостенным конструкциям [5, 6]. Числен-
ная реализация решений проводится методом конечных элементов
[7–9]. Используемый подход позволяет максимально адекватно опи-
сать условия закрепления и нагружения рабочих органов, автоматизи-
ровать проведение расчетов и выполнить анализ результатов расчета
для различных вариантов исполнения. В соответствии с используемой
конструкторской классификацией, система двух вращающихся валов,
соединенных гибкими связями, образует пильный блок. Описание дви-
жения пильного блока можно свести к исследованию системы нели-
нейных дифференциальных уравнений, для решения которых исполь-
зуются методы численного интегрирования по времени, спектральный
анализ реализаций и качественные методы исследования нелинейных
дифференциальных уравнений (отображение Пуанкаре и отображение
сдвига) [10–12].
Введем следующие обозначения (рис. 2,
б
):
ϕ
в
(
t
) =
ω
в
t
— угол по-
ворота ведущего (нижнего) вала;
ω
в
— угловая скорость вращения ве-
дущего вала,
ϕ
2
=
ϕ
в
(
t
) + Δ
ϕ
— угол поворота ведомого вала;
L
0
—
расстояние между осями валов,
L
=
L
0
+ Δ
L
— расстояние между
осями вращения корпусных деталей при повороте ведомого вала от-
носительно ведущего;
e
— эксцентриситет оси вращения корпусной
детали. Запишем выражение для
Δ
L
— изменения расстояния между
110 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2010. № 4


