Y > mg
;
Y
≤
mg.
(6)
Часть поверхности
X
, находящаяся под плоскостью
P
дв
(рис. 3,
а
),
описывает торможение БПЛА, часть поверхности
X
, находящаяся над
плоскостью
P
дв
, описывает разгон БПЛА. Аналогично часть поверхно-
сти
Y
(рис. 3,
б
) находящаяся под плоскостью
mg
, описывает снижение
БПЛА. Линия пересечения
X
и
P
дв
описывает стационарный режим
по скорости, линия пересечения
Y
и
mg
— стационарный режим по
высоте.
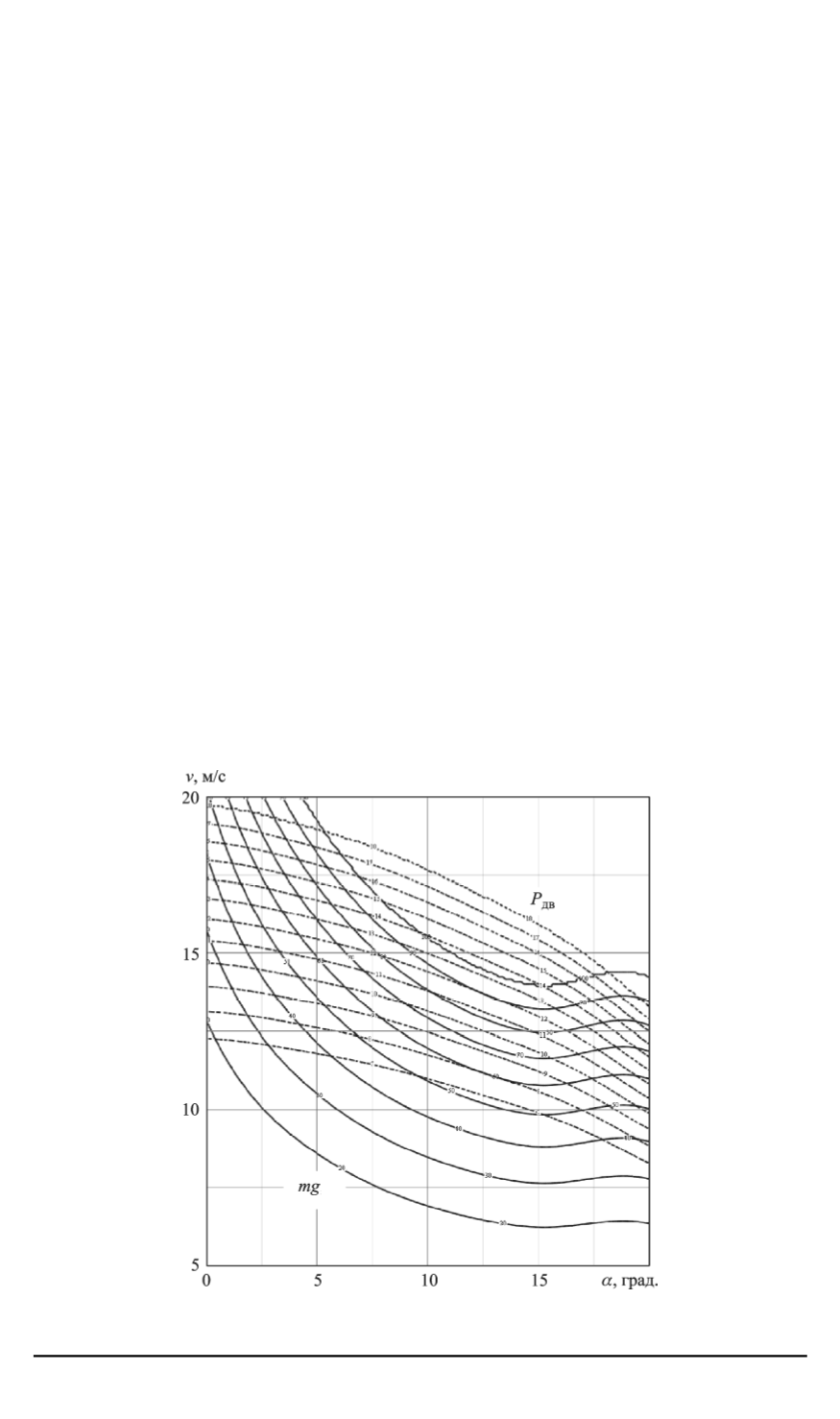
Поверхности
X
и
Y
можно представить в виде изолиний (рис. 4),
соответствующих наборам значений тяги и массы БПЛА. Набор зна-
чений тяги описывает дросселированные двигателя, набор значений
массы — варьирование массы БПЛА-электролета за счет изменения
состава аппаратуры.
Рассмотрим более подробно отдельную лепесткообразную область
(см. рис. 5).
Стационарный полет в соответствии с уравнением (2) (сумма сил,
действующих на БПЛА) возможен в точках “Стац. полет 1” и “Стац.
полет 2”, показанных на рис. 5. Технически точка “Стац. полет 2”
располагается близко к срывной зоне (
α > α
крит
), и стационарный по-
лет там неосуществим. Эта точка определяет минимальную взлетную
скорость
v
взл
. Лепесткообразная зона разгон–набор представляет собой
зону, в которой возможно маневрирование БПЛА без потери высоты
и скорости.
Рис. 4. Изолинии, соответствующие наборам значений тяги и массы БПЛА
82 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2013. № 3


